




Dominik Herrmann, 28
Stuttgart und Schwäbisch Gmünd
 Urlaub in
Italic
Urlaub in
Italic
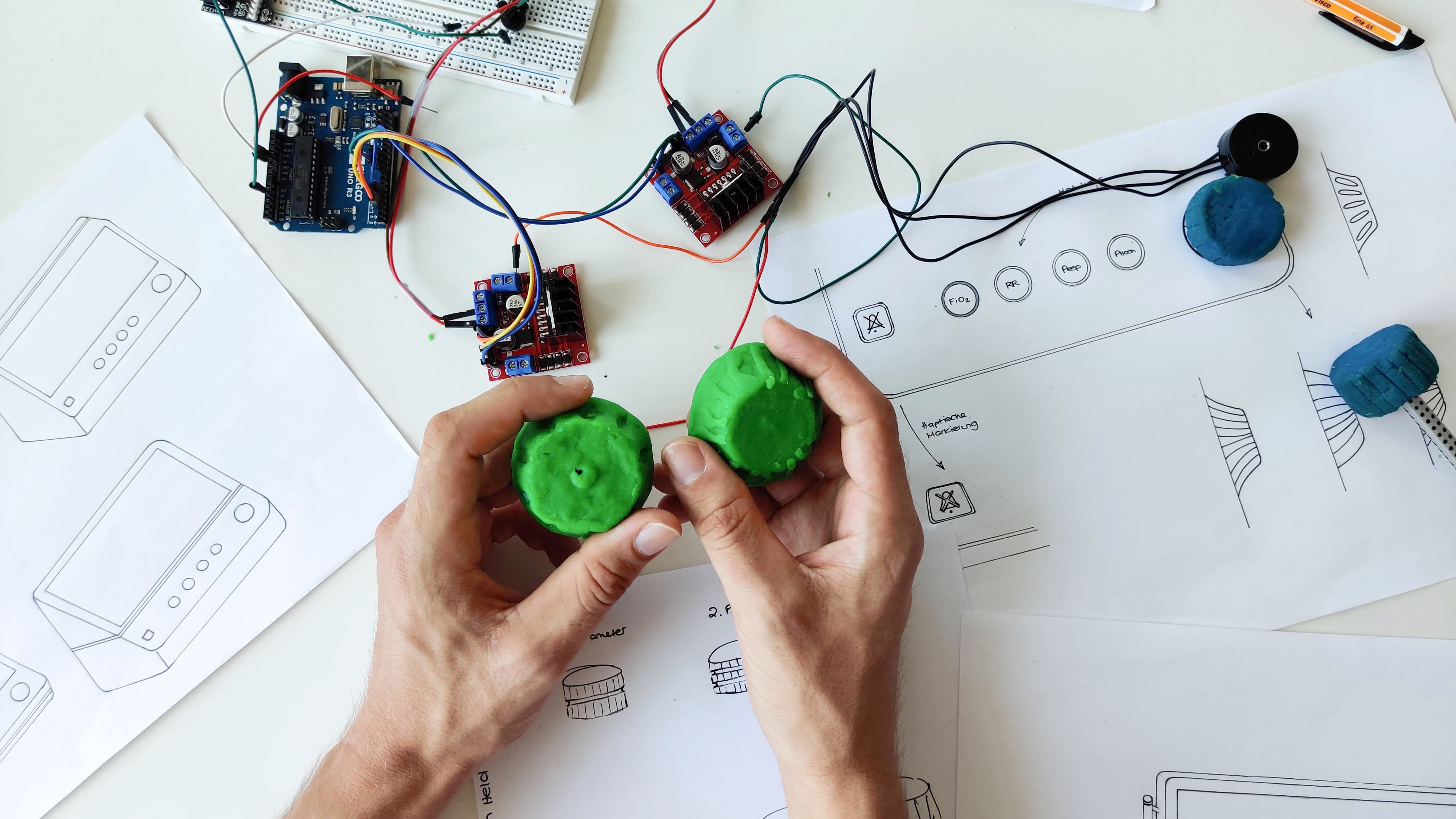
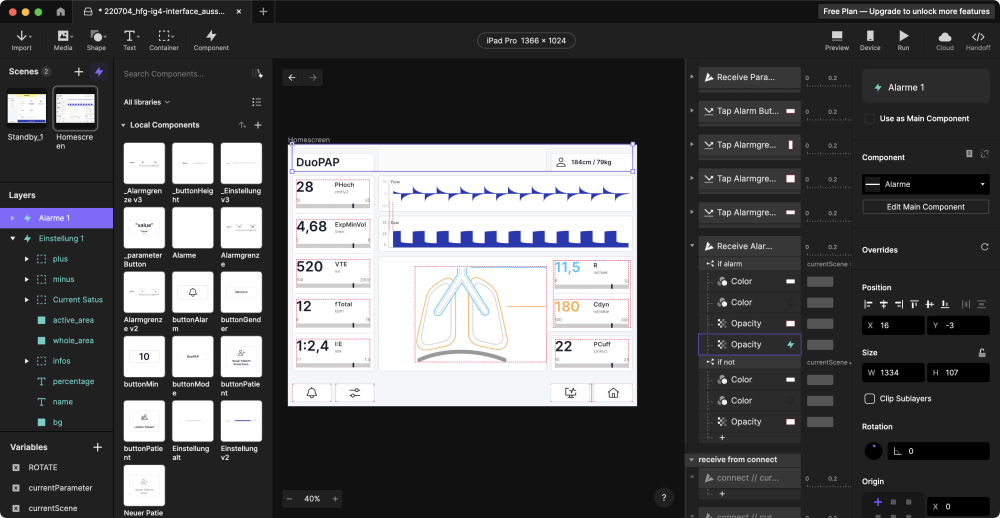
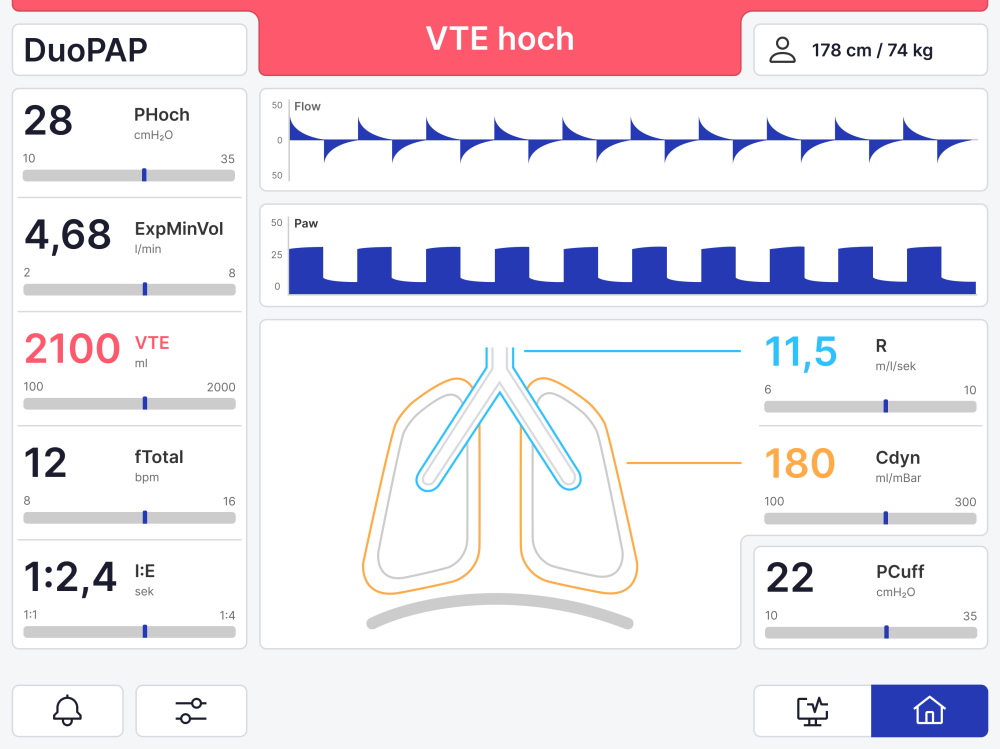
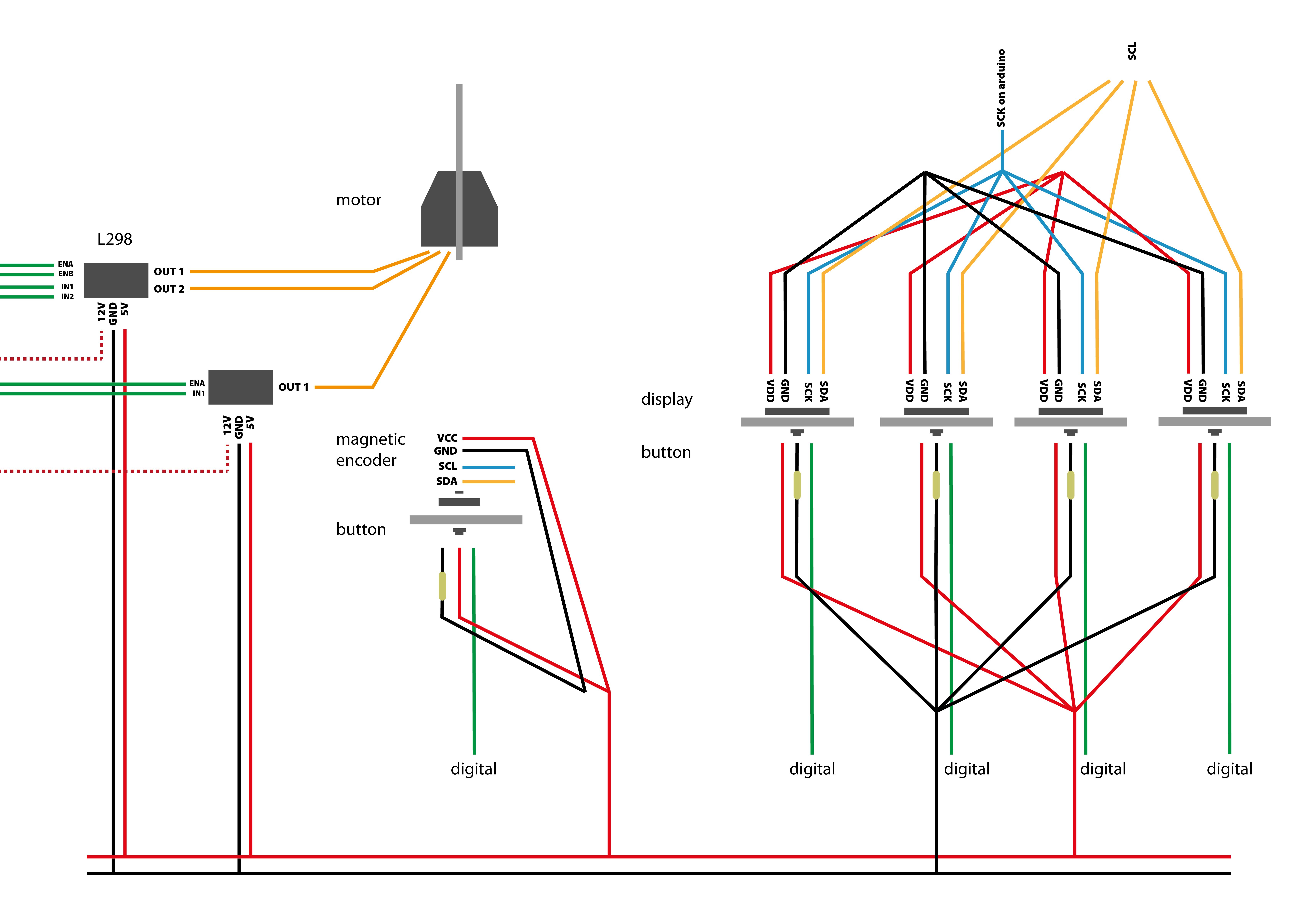
Ich denke, ein UI-Designer sollte eine grobe Ahnung von Programmierung haben, so wie ein Produkt-Designer die Eigenschaften seiner Materialien kennen sollte.
 Selbst gefangen
Selbst gefangen
